
2021年10月26日(火)14:00~15:30、当社主催のウェビナー「ゼンリン道路情報 × MATLAB®/Simulink®~実道路情報のシミュレーション/MBDへの活用~」が開催され、179名が参加しました。
登壇者
今回のウェビナーには以下の4者が登壇しました。
・大阪大学大学院工学研究科 モビリティシステム共同研究講座 特任講師
芳澤 信哉さん(以下 芳澤さん)
・The MathWorks GK アプリケーションエンジニアリング部 自律システム・ロボティクス担当 シニアチームリーダー・プリンシパルアプリケーションエンジニア
大塚 慶太郎さん(以下 大塚さん)
・ゼンリン 事業統括部 オートモーティブ事業本部 車載ソリューション営業二部 営業二課
杉本 謙さん(以下 杉本さん)
・当社IoT第三事業部 IoT第三事業部 専任課長
三橋 慎司さん(以下 三橋さん)
ウェビナーの内容を要約してご紹介します。
地図・道路情報の活用に関するMathWorksの取り組み
はじめに杉本さんより「いつもNAVI API3.0」で利用している地図データについて説明いただきました。
その後、大塚さんからMathWorks社のサービスにおける「いつもNAVI API3.0」の活用について発表いただきました。
MathWorks社では「MATLAB®/Simulink®」というサービスを主力として提供しています。
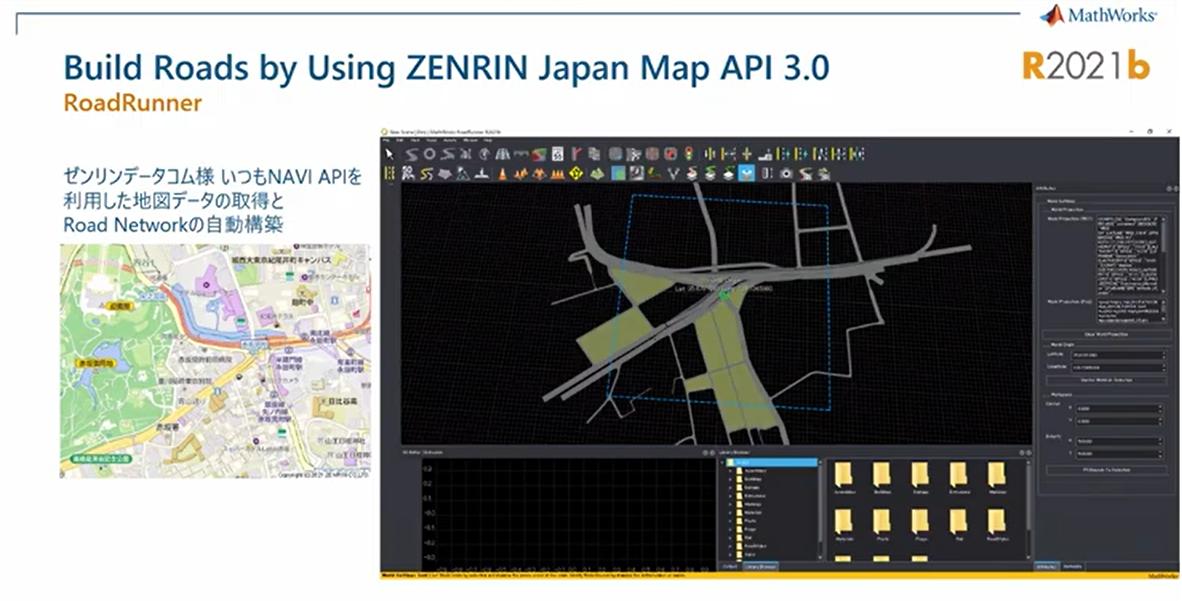
昨今、電動化や自動運転・ADAS・コネクテッドカーの開発などが流行となっていることから、仮想環境上で検証ができる製品の提供にも力を入れており、「Driving Scenario Designer」「Road Runner」の2つのサービスの提供も開始しました。
この2つのサービスの使用にあたっては以下のような課題がありました。
・道路環境を手作業で作成するには労力がかかる。
・とある環境で作成した道路データを他の環境で使用・共有することができない。
(環境に依存しない情報を利用したい。)
・オープンな地図データの場合、情報の信頼性が乏しい。
・仮想環境の構築においてMATLAB®/Simulink®」では日本の地図データがサポートされていない。
これらの課題を解決したのが「いつもNAVI API3.0」となります。
これまで手動で行っていた道路の作成が「いつもNAVI API3.0」との連携によって自動化が実現し、効率的な開発が可能となりました。

「いつもNAVI API3.0」の導入によるメリットは2つ挙げられます。
・ゼンリンの地図ということで鮮度・精度が素晴らしい。
・立体交差がある道路の再現もできている。
「Driving Scenario Designer」「Road Runner」内で使用されているAPIは道路リンク検索のみとなりますが、ルート検索APIやルートマッチングAPIなど他の機能についても利用が可能です。
いつもNAVI API3.0を活用した電気自動車電力消費推定モデル
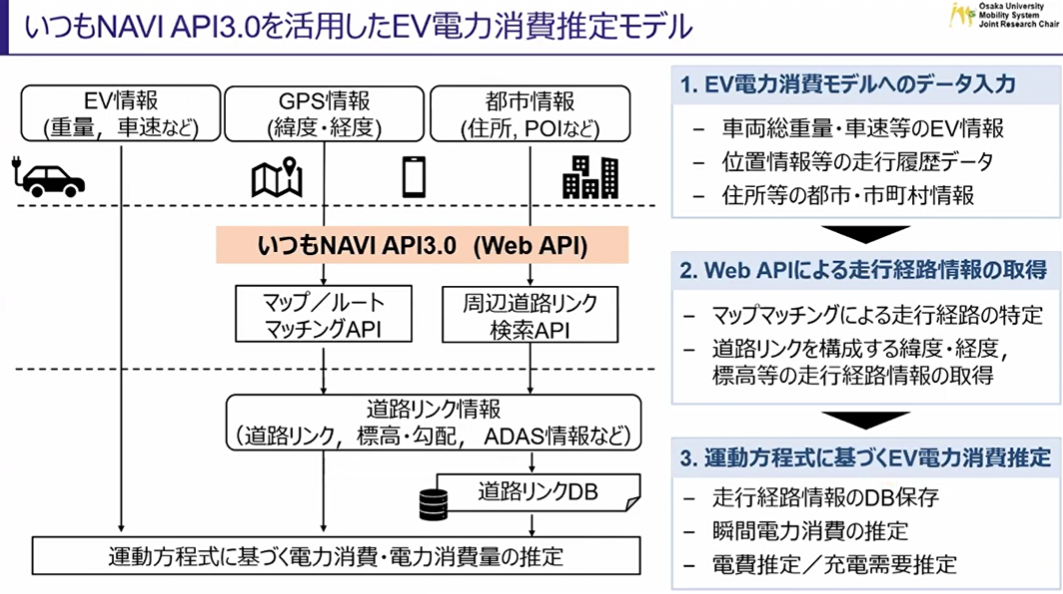
つづいて芳澤さんより、「いつもNAVI API3.0」を活用した電気自動車(EV)の電力消費推定モデル」というテーマで講演いただきました。
芳澤さんが特任講師を務めるモビリティシステム共同研究講座では、EVを活用したスマートコミュニティの研究・開発を行っており、電力・都市・交通といったマルチレイヤーからなるスマートシティプラットフォームの構築を進めています。
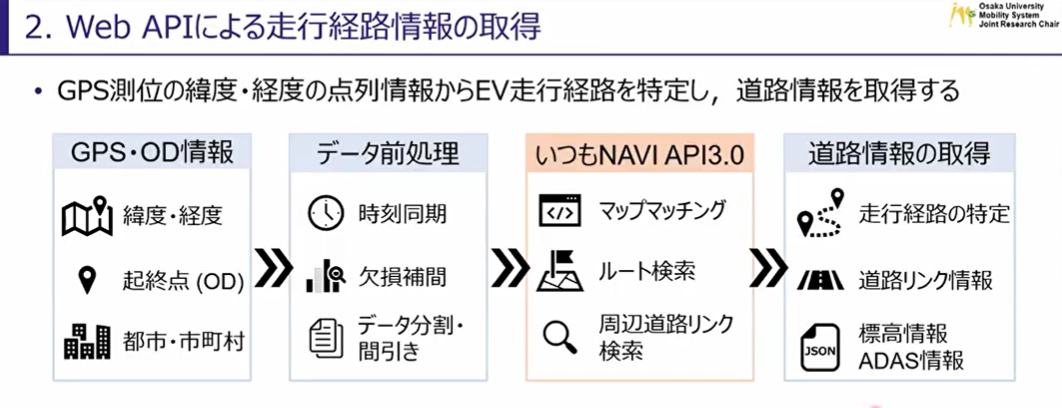
この研究・開発の中で、EVの走行経路の特定(マップマッチング機能を使用)や緯度・経度・標高といった各種道路情報を取得する際に「いつもNAVI API3.0」は利用されています。
「いつもNAVI API3.0」の利用により、高い精度の推定値を出すことが可能となりました。
「いつもNAVI API3.0」導入のメリットとしては、以下の4つが挙げられます。
・ゼンリンの地図データは正確性が保証されていること。
・道路ネットワークや住所データを容易に把握できること。
・一般道や高速道路などの主要道路情報や 標高の取得も可能。
・住所データも取り扱っているため、住所ポリゴン検索やジオフェンス作成が可能。
デメリットは「APIを利用する際、データの前処理が必要で手間がかかること」です。
「いつもNAVI API3.0」の特徴と利用までの流れ
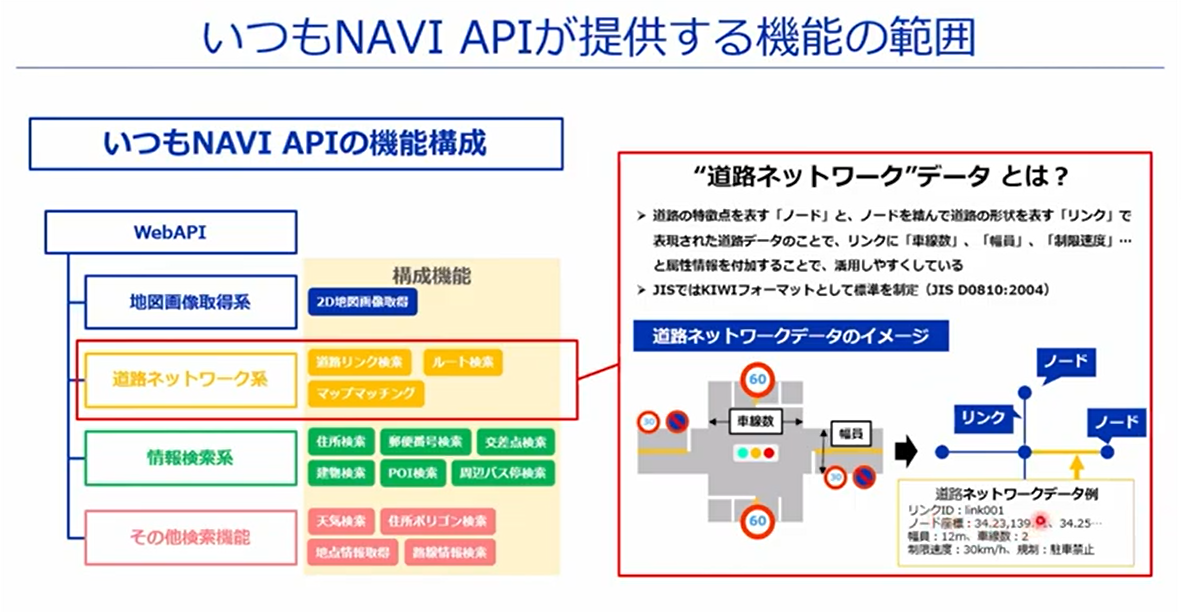
最後に三橋さんより、地図画像や施設情報・制限速度など、さまざまな特性情報を持った道路ネットワークデータを提供する「いつもNAVI API3.0」の特徴と利用までの流れについて説明が行われました。
今回のウェビナー内で紹介のあった各サービス内で使われている3つの機能についても紹介がありました。
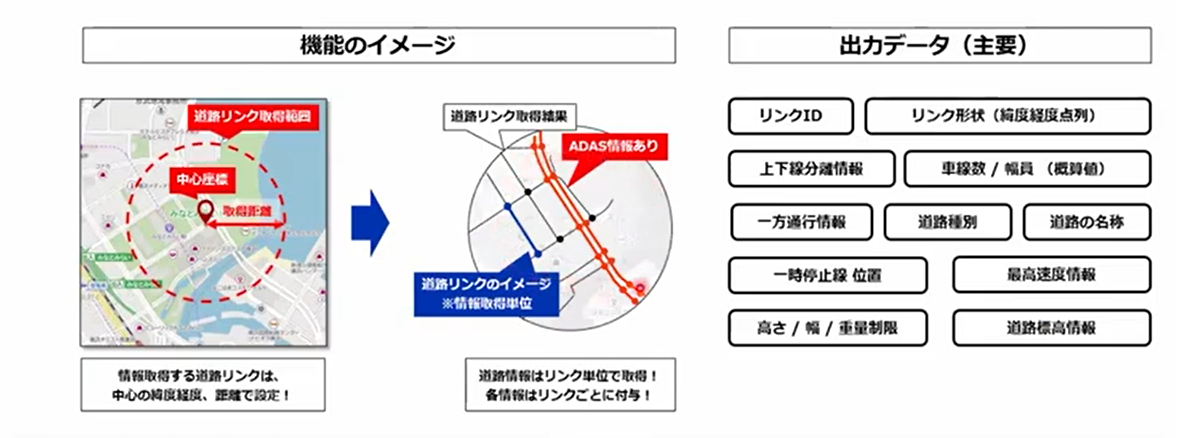
主な機能①周辺リンク検索機能
緯度経度を指定して検索をかけると該当の道路リンク情報を返却することができる機能です。
ゼンリンの道路情報を使用しているため、立体的な道路、橋の表現、標高情報といった詳細情報まで取得することができます。
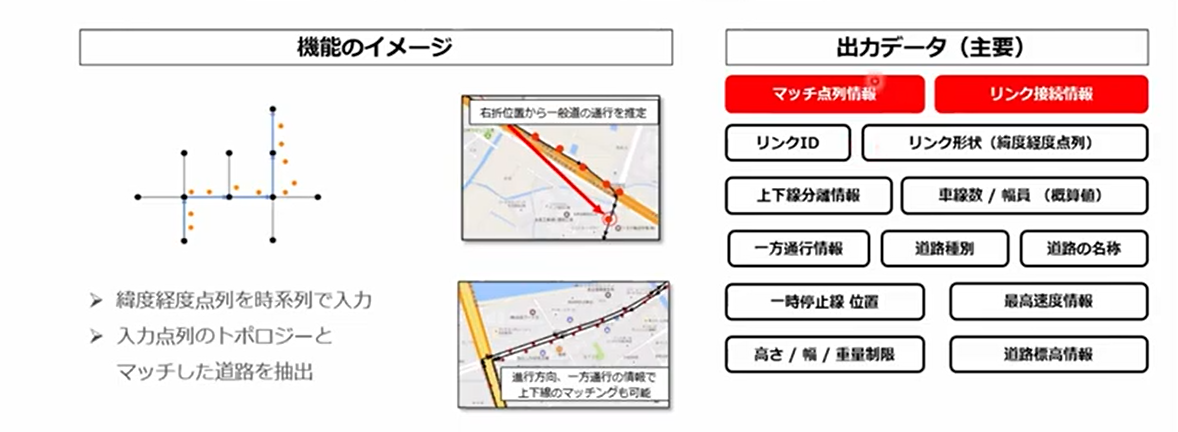
主な機能②マップマッチング機能
時系列で緯度経度を入力すると点列から移動した経路を推定し、マッチした自動車道路リンクデータを返却する機能です。
主な機能③各種施設検索
フリーワードやジャンル・緯度経度を指定すると対象となる施設を検索。
指定した位置の緯度経度情報と各種付随情報を返却する機能となります。

これらの3つの主な機能に加えて、地図画像の取得やルート検索、住所ポリゴン検索や標高情報取得、交差点検索などの機能も搭載されています。
「いつもNAVI API3.0」の活用の幅広さをアピールする三橋さん。
質疑応答の後、ウェビナーは終了しました。
ウェビナーを終えて
ウェビナーを終えて、三橋さんよりコメントをいただきました。
Q.今回2回目のウェビナー登壇ということですが、手ごたえや参加者の反応はいかがでしたか?
三橋さん:
大阪大学の芳澤先生、MathWorksの大塚様のご講演の効果もあってか、ありがたいことに、聴講者の反応も良く、大変良い手ごたえを感じています。
今回のウェビナーの一番の目的は、当社としては新たな顧客領域である、自動車制御系の企業・大学のハウスリストの獲得でしたが、それぞれ自動車会社で62件、サプライヤで49件、大学で51件、と、ターゲットに限っても、計162件の新規リードを獲得できました。
また、ウェビナー後にフォローを実施いたしましたが、反応も良く、すでに11件程度のテスト利用が予定もしくは実施されており、その他の企業でも継続して検討していただいております。
Q.今後の課題や販促・サービスの拡張に向けての取り組みがあれば教えてください。
三橋さん:
制御分野での地図活用は、まだまだ新しい取り組みというところもございまして、サービスの認知度の向上とハウスリストの拡充は、当面の一番の課題であると考えております。
これらの課題を解消するため、例えば、交通流シミュレーション分野での活用範囲の拡充や新たなベンダーとコラボレーションしたウェビナーの開催、ゼンリンの3D都市モデル部隊との連携など、露出機会、連携による製品力、クロスセールスによる営業力などの向上といったことに取り組んでいく予定です。