
2021年5月13日(木)14時00分~16時10分、MathWorks合同会社(以下MathWorks)主催のウェビナー「<ゼンリンGr × MATLAB> 自動運転・ロボティクス開発最新トレンド」にゼンリンの杉本 謙さん(以下 杉本さん)と当社IoT事業本部 IoT第三事業部の三橋 慎司さん(以下 三橋さん)が登壇しました。
MathWorksの主力ツールであるMATLAB/Simulinkに、当社の「いつもNAVI API」の 取り込みインターフェイスを新たな機能として加えました。
これにより、MATLAB/Simulink内での日本国内の道路モデルの生成が容易となり、制御設計において様々なシミュレーションによる検討が実現可能となりました。
杉本さん、そして三橋さんは1つ目のセッションに登壇し、「自動運転アルゴリズムの開発・検証における地図データの活用」というテーマで、「いつもNAVI API」のサービス概要と仮想環境を構築するにあたっての地図データの活用事例について、約400名の参加者へ紹介しました。
制御シミュレーション分野での「いつもNAVI API」活用事例
「いつもNAVI API」では地図図面や施設情報だけでなく、制限速度や進行方向、道路種別、停止線の位置といった特性情報を持った道路のネットワークデータを提供しています。
またトンネルや橋、立体交差、主要幹線道路の標高情報の提供やマップマッチング機能※1、POI検索※2やルート検索も可能で、より現実に近い各種シミュレーションが可能となります。
※1:位置情報の誤差を補正する機能。
これにより高速道路と一般道路が 並走する区間であっても正確な道路特定が可能です。
フィールドテストの走行結果のGPSデータを読み込み、道路を特定することもできます。
※2: ジャンル別検索や施設名検索、指定地点の周辺検索が実施でき、
学校や病院、交通関連の施設など、検証したい対象の位置を簡単に抽出することが可能です。
このような多種、多様な機能を持つ「いつもNAVI API」を使った制御シミュレーション分野における活用事例を3つ紹介しました。
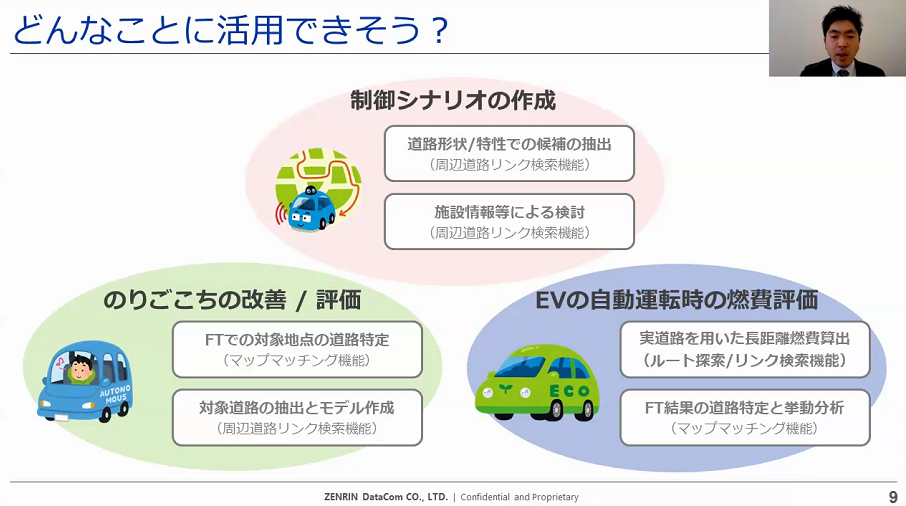
①制御シナリオの作成
道路の勾配や標高等の特性を明らかにすることで、対象とすべき道路を選定し、検証したい道路群データを高速に作成できます。
さらにマップマッチング機能を使って走行ルートの特性を簡単に分析することが可能です。
②のりごこちの改善と評価
各種センサーを付けて走行したフィールドテストのログデータから走行に向いていない道路を特定します。
特定した道路を特性情報や周辺地図と合わせて確認することで、なぜ向いていないのか、という一歩先を進んだ分析が可能となります。
③EVの自動運転時の燃費評価
長距離走行時のルート設定やルートの正確な標高情報、制限速度情報、信号や停止線の位置情報などが活用でき、よりリアルな燃費評価と最適な制御の検討が可能となります。
このように、使い方次第であらゆる効果を発揮し、これまでできなかった制御の検討が実現できることをアピールしました。
ウェビナーを終えて
最後に、三橋さんよりウェビナーを終えてのコメントをいただきました。
Q.手ごたえや参加者の反応はいかがでしたか?
三橋さん:
参加者からは、闊達な質問を頂き、関心度の高さがうかがえました。
また、MathWorks様より事後に共有いただいたアンケートでは、回答者の6割の方から、「活用できそう/使ってみたい」との回答をいただき、非常に手ごたえのある反応であると感じております。
Q.ウェビナーへの登壇にあたり、工夫したことや気を付けた点はありますか?
三橋さん:
自動車の制御分野の方々は、これまでナビゲーションや地図情報に触れる機会が少ないため、極力、一般的な言葉でわかりやすく、地図情報とゼンリンの地図の優位性を説明するように気をつけました。
また、シミュレーションの地図への利用は、新しい取り組みであるため、ユースケースをイメージしていただきやすいように工夫いたしました。
Q.「いつもNAVI API」ですが、この先どのような分野にサービスを展開していきたいと考えていますか?
また今後の取り組み等あれば教えてください。
三橋さん:
まずは、自動車の制御設計分野において、シミュレーション用の道路モデル作成のスタンダードとなるように、サービスを展開していきたいと思います。
今後の取り組みですが、シミュレーションの地図への活用はまだまだ認知度が低い状態ですので、パートナーと連携したセミナーや営業活動を通して、まずは業界内の認知度を向上させていきたいと考えております。
2021年6月8日(火)、オンライン上で開催された「MATLAB EXPO 2021」、MathWorks社講演「RoadRunnerによる自動運転/ADAS向け3Dシーン作成とシミュレーション」においても、「いつもNAVI API」 とMathWorks製のシミュレーションツールとの連携について、デモを交えて紹介されました。
講演の動画、資料は下記リンクよりご確認いただけます。ぜひご覧ください。
https://www.matlabexpo.com/jp/2021/proceedings.html